Equipos de robots tienen el potencial de abordar misiones mucho más elaboradas que los robots individuales, por ejemplo, cubrir largas distancias más rápido, visitar diferentes sitios simultáneamente o monitorear áreas geográficas más grandes. Plataformas que combinan hardware y software confiable para aplicaciones multi-robot podrían ayudar a avanzar en la investigación en este campo, facilitando la prueba de equipos de robots en entornos reales específicos.
Investigadores de la Universidad de Cambridge recientemente introdujeron la Cambridge RoboMaster, una plataforma prometedora para la investigación de robots múltiples. Esta plataforma incluye el diseño de una flota de robots Robomaster personalizados, junto con software para simular y entrenar a los robots en tareas específicas. Amanda Prorok, Investigadora Principal, declaró: «Nuestra misión es desarrollar soluciones para la inteligencia colectiva en sistemas de robots y agentes múltiples». Este enfoque incorpora métodos de aprendizaje automático, planificación y control, con aplicaciones en transporte automatizado, logística, monitoreo ambiental y búsqueda y rescate.
Características de la Plataforma
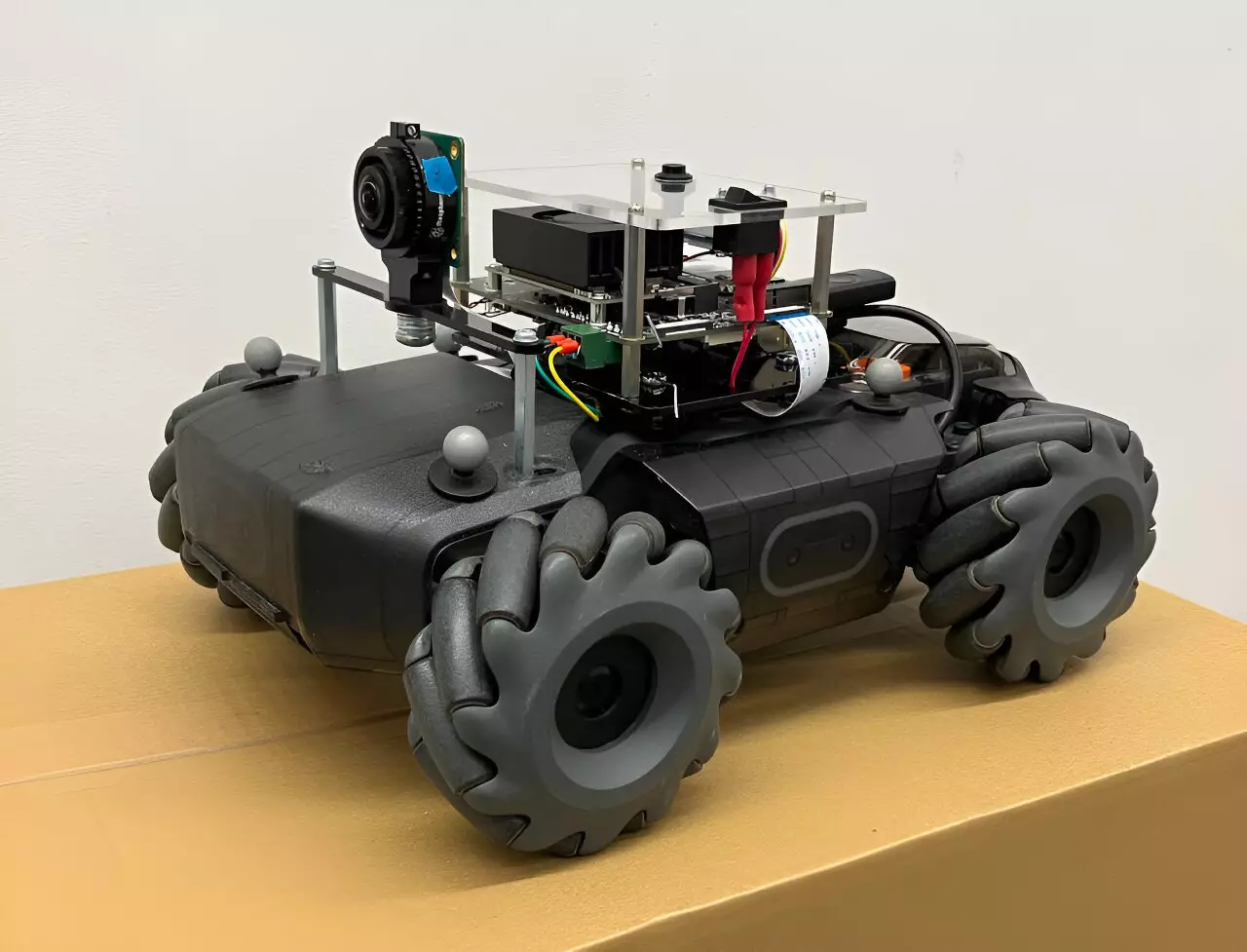
Blumenkamp y sus colegas desarrollaron una plataforma de investigación multi-robot que cumpliera una serie de requisitos, como potencia informática de vanguardia, velocidad, agilidad y durabilidad. Decidieron utilizar versiones personalizadas de robots DJI RoboMaster S1, robots pequeños y con ruedas diseñados originalmente para competencias de nivel secundario y universitario. Durante tres años han trabajado en mejorar esta plataforma, agregando más capacidades informáticas, sensores y software de control para utilizarla en varios proyectos.
Ventajas de la Plataforma
Un detalle destacado de la Cambridge RoboMaster es el equilibrio perfecto entre el tamaño del robot y sus capacidades. Los robots personalizados de DJU superan las limitaciones de los robots más pequeños, con escasa potencia informática, y de los robots más grandes, costosos y poco manejables en interiores. Es una herramienta valiosa para demostraciones e investigaciones en sistemas multi-agentes, con un coste accesible para investigadores y una amplia gama de aplicaciones prácticas.
La plataforma Cambridge RoboMaster ha demostrado ser un instrumento altamente versátil, confiable y accesible para la investigación de robots múltiples. Está disponible en GitHub para que los grupos de investigación en todo el mundo prueben algoritmos para diversas aplicaciones de robots múltiples, como logística de transporte automatizado, monitoreo ambiental y misiones de búsqueda y rescate. Su continua mejora y expansión podría llevar a nuevos avances en la investigación de sistemas de robots y agentes múltiples.
Deja una respuesta