La evolución de la robótica ha provocado un cambio significativo desde las estructuras rígidas tradicionales hacia diseños más dinámicos y flexibles. Este cambio prioriza la interacción tanto con entornos delicados como con los seres humanos. En este contexto, los actuadores neumáticos blandos basados en tela (FSPAs, por sus siglas en inglés) ejemplifican esta tendencia, destacándose por su capacidad única para sostener y manipular movimientos intrincados sin los peligros asociados con los robots convencionales. Estos dispositivos innovadores operan fundamentalmente a través de los principios de inflación y desinflación, lo que les permite realizar movimientos diversos como doblarse, retorcerse y estirarse.
Dado su costo económico, diseño adaptable y naturaleza gentil, los FSPAs son cada vez más relevantes en diversas aplicaciones, que van desde tecnología portátil hasta dispositivos de asistencia. Sin embargo, la investigación y el desarrollo en esta área se enfrentan a desafíos complejos, especialmente en lo que respecta al diseño y la selección de materiales. Encontrar el equilibrio adecuado entre el rendimiento del actuador y la eficiencia en la fabricación sigue siendo un obstáculo considerable en el campo de la robótica suave.
Patrones de Turing en el Diseño de FSPAs
Recientemente, ha surgido una investigación innovadora que combina los patrones de Turing —formaciones complejas observadas en la naturaleza— con el proceso de diseño de FSPAs, revolucionando la forma en que estos dispositivos operan y se producen. El concepto fundamental detrás de los patrones de Turing proviene del trabajo del matemático y lógico Alan Turing. En su artículo de 1952 sobre la morfogénesis, Turing propuso que ciertos patrones en la naturaleza surgen de procesos de reacción-difusión, en los que dos sustancias químicas interactúan de maneras que promueven y suprimen entre sí, llevando a una organización espacial.
Traducir esta teoría al contexto de los FSPAs presenta una oportunidad intrigante: al emplear estos patrones en el diseño de la superficie de los actuadores, los investigadores pueden crear estructuras de tela que se deforman de manera predecible y eficiente. Figuras clave en esta investigación incluyen al Dr. Masato Tanaka, Dr. Tsuyoshi Nomura y Dr. Yuyang Song, quienes abogan por la integración del trabajo de Turing en la robótica suave. Sus aportes colectivos revelan una necesidad urgente de actuadores blandos capaces de realizar movimientos matizados derivados de mecanismos simples.
Una de las evoluciones más significativas en el diseño de FSPAs es la automatización del proceso de producción. El enfoque tradicional para diseñar estos actuadores a menudo ha sido ineficiente, requiriendo un amplio ensayo y error para identificar los materiales y configuraciones óptimas. El Dr. Tanaka enfatiza que las estructuras existentes utilizan principalmente materiales isotrópicos—tecidos que se comportan de manera uniforme y que limitan la complejidad potencial de los movimientos. Para superar esta limitación, el equipo de investigación desarrolló un método para optimizar el diseño de las superficies de los actuadores, aprovechando materiales anisotrópicos que pueden doblarse y estirarse de manera diferente según su orientación.
Mediante un análisis de elementos finitos no lineales, el equipo pudo crear patrones específicos que facilitan movimientos controlados durante la inflación o desinflación. Innovadoramente, tradujeron modelos matemáticos de sistemas de reacción-difusión en diseños reales, simplificando el entramado de la tela en texturas anisotrópicas con patrones de Turing.
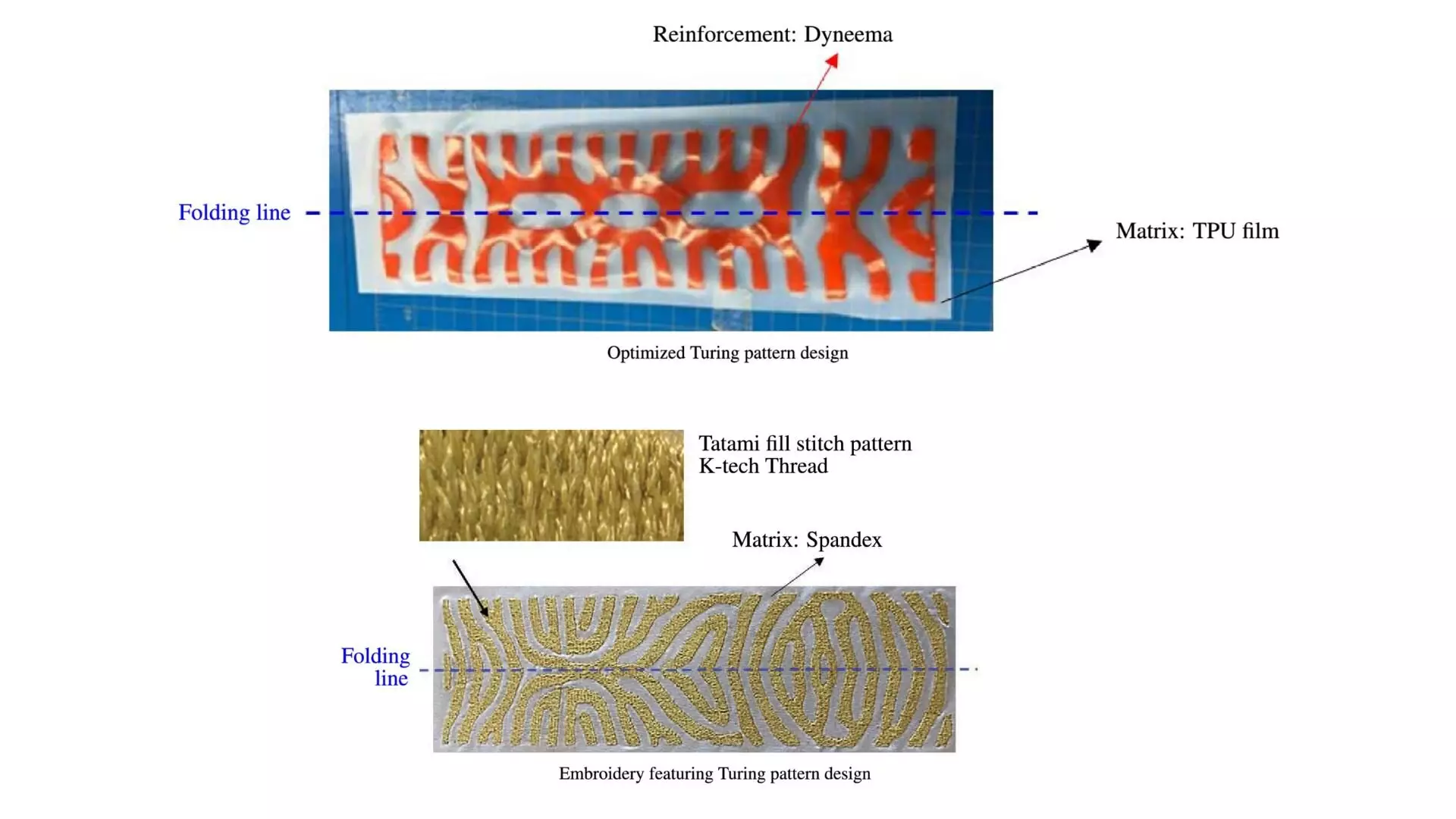
La ejecución exitosa de estos patrones depende en gran medida de métodos de fabricación efectivos. El equipo de investigación investigó dos técnicas clave: el ensamblaje por calor y la bordadura. El ensamblaje por calor consiste en adherir un tejido rígido a un sustrato más blando utilizando un patrón de Turing grabado con láser, lo que da como resultado un actuador que reacciona dinámicamente bajo presión. Por otro lado, la técnica de bordado incorpora hilos rígidos en el tejido blando, otorgando un control preciso sobre el movimiento al crear áreas con rigidez variable.
Estos métodos de fabricación no solo hacen factible replicar diseños complejos a mayor escala, sino que también mejoran la eficiencia de costos. Además, el análisis del equipo indica que estos diseños con patrones de Turing superan consistentemente a los diseños más simples y tradicionales en pruebas funcionales, confirmando la utilidad de integrar matemáticas avanzadas con aplicaciones prácticas de ingeniería.
Perspectivas Futuras
De cara al futuro, el potencial de integrar patrones de Turing con tecnologías de materiales emergentes—como polímeros con memoria de forma y materiales electroactivos—podría resultar en actuadores con dinámicas de rendimiento aún más variadas y sofisticadas. Los investigadores prevén escalar los métodos demostrados en su trabajo inicial para satisfacer las demandas de producción en masa, posiblemente a través de avances como la impresión 3D y técnicas de tejido automatizado que optimizan tanto la precisión como la eficiencia.
La exploración de los patrones de Turing en los actuadores neumáticos blandos basados en tela ofrece una frontera prometedora no solo en la robótica suave, sino también en diversas aplicaciones que giran en torno a los principios de seguridad, flexibilidad e interacción humano-robot. La sinergia entre la innovación matemática y el avance tecnológico sugiere un camino hacia el futuro de la robótica que es más integrado y accesible.
Deja una respuesta