El uso de sistemas robóticos se ha expandido más allá de los entornos interiores tradicionales para incluir configuraciones exteriores como bosques, áreas de desastre y edificios grandes. Los robots aire-tierra muestran promesas en la navegación de estos entornos complejos, pero surgen desafíos cuando los obstáculos obstruyen sus sensores, lo que conduce a trayectorias subóptimas y posibles colisiones.
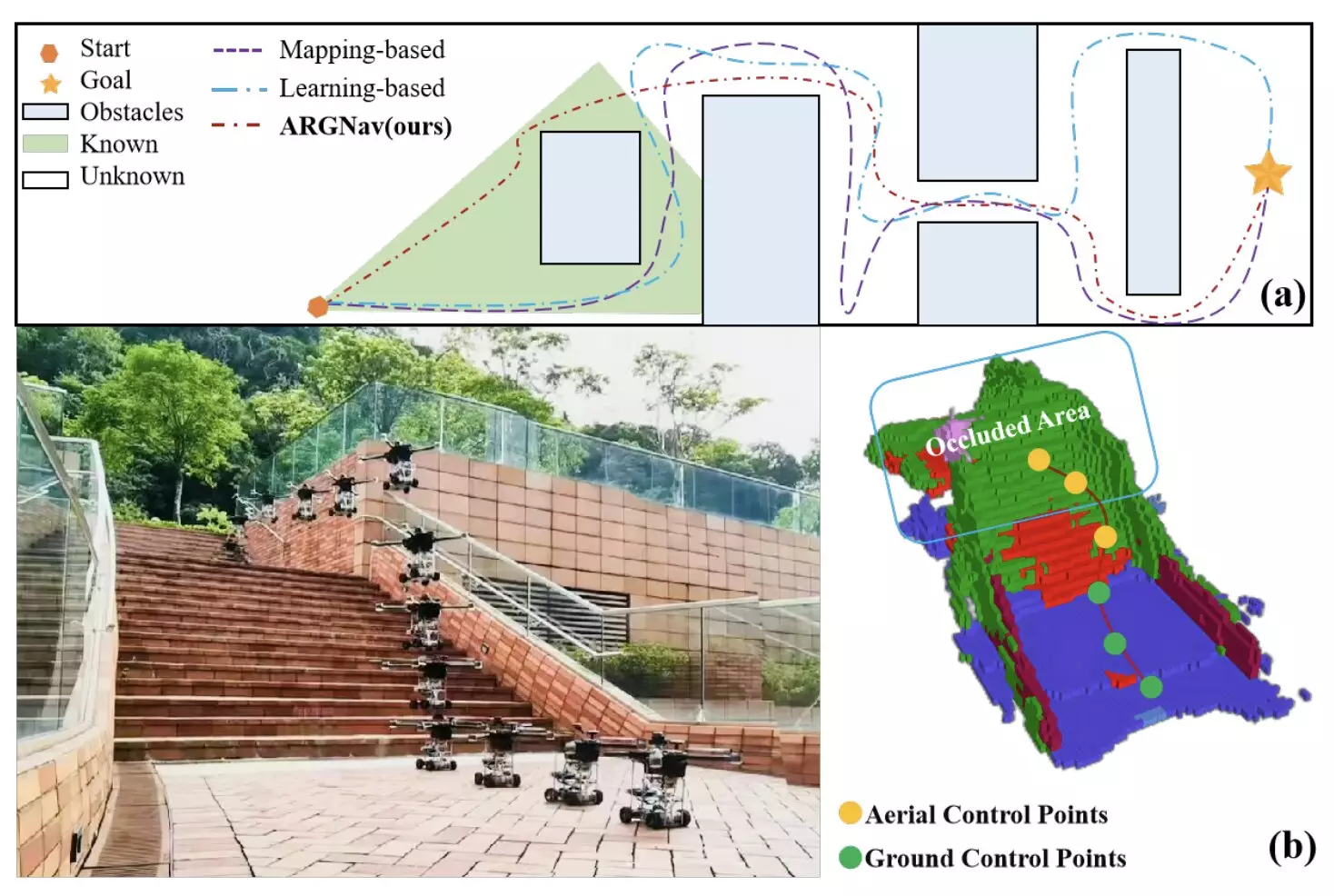
Investigadores de la Universidad de Hong Kong han desarrollado un novedoso marco, AGRNav, destinado a mejorar la navegación autónoma de robots aire-tierra en entornos propensos a la oclusión. AGRNav consta de dos componentes principales: una red de completado semántico ligera (SCONet) y un planificador de ruta jerárquico.
La SCONet utiliza aprendizaje profundo para predecir la distribución de obstáculos y sus características semánticas en el entorno. Capturando información contextual y características de áreas de oclusión, la SCONet permite predicciones de obstáculos precisas con una carga computacional mínima. Luego, el planificador de ruta jerárquico utiliza estas predicciones para planificar trayectorias óptimas y eficientes en energía tanto aéreas como terrestres para que el robot alcance su destino.
Las evaluaciones del marco AGRNav en entornos simulados y del mundo real utilizando un robot aire-tierra personalizado mostraron que AGRNav superó a los marcos de navegación existentes, proporcionando trayectorias óptimas y eficientes en energía para el robot en entornos propensos a la oclusión. La naturaleza de código abierto de AGRNav permite un acceso generalizado y su posible implementación en otras plataformas robóticas aire-tierra, señalando un avance en la navegación efectiva en entornos del mundo real.
El desarrollo de AGRNav abre posibilidades para la implementación generalizada de robots aire-tierra en entornos exteriores desafiantes. Al permitir que los robots naveguen terrenos complejos con precisión y eficiencia, AGRNav allana el camino para aplicaciones críticas como misiones de búsqueda y rescate, entrega de paquetes a ubicaciones remotas y monitoreo ambiental. Con su enfoque innovador en la predicción de obstáculos y la planificación de rutas, AGRNav tiene el potencial de transformar las capacidades de los robots aire-tierra en escenarios del mundo real.
El marco AGRNav representa un avance significativo en mejorar la navegación de robots aire-tierra en entornos propensos a la oclusión. Al combinar técnicas de aprendizaje profundo con algoritmos eficientes de planificación de rutas, AGRNav aborda los desafíos enfrentados por los robots que operan en entornos exteriores complejos. Los prometedores resultados obtenidos de simulaciones y experimentos del mundo real subrayan el potencial de AGRNav para revolucionar la implementación de robots aire-tierra en diversas aplicaciones. A medida que la tecnología continúa evolucionando, marcos como AGRNav desempeñan un papel crucial en dar forma al futuro de la robótica en entornos desafiantes y dinámicos.
Deja una respuesta