El aprendizaje por imitación es un método prometedor para enseñar a los robots cómo completar tareas cotidianas de manera confiable, como lavar platos o cocinar. Sin embargo, los marcos de aprendizaje por imitación dependen de demostraciones humanas detalladas, que deben incluir datos que ayuden a reproducir movimientos específicos utilizando sistemas robóticos. Una forma de recopilar estas demostraciones es mediante sistemas teleoperados, que permiten a los humanos controlar los movimientos de manipuladores robóticos para completar tareas específicas.
Investigadores de la Universidad de California, San Diego, desarrollaron recientemente Bunny-VisionPro, un sistema que permite la teleoperación de un sistema robótico para completar tareas de manipulación bimanual. Presentado en un artículo publicado en el servidor de preimpresión arXiv, este sistema podría facilitar la recopilación de demostraciones humanas para el aprendizaje por imitación. Este sistema innovador se ha diseñado para abordar la necesidad de avanzar en la teleoperación bimanual para robótica, centrándose en el control de doble mano, esencial para tareas complejas que requieren coordinación.
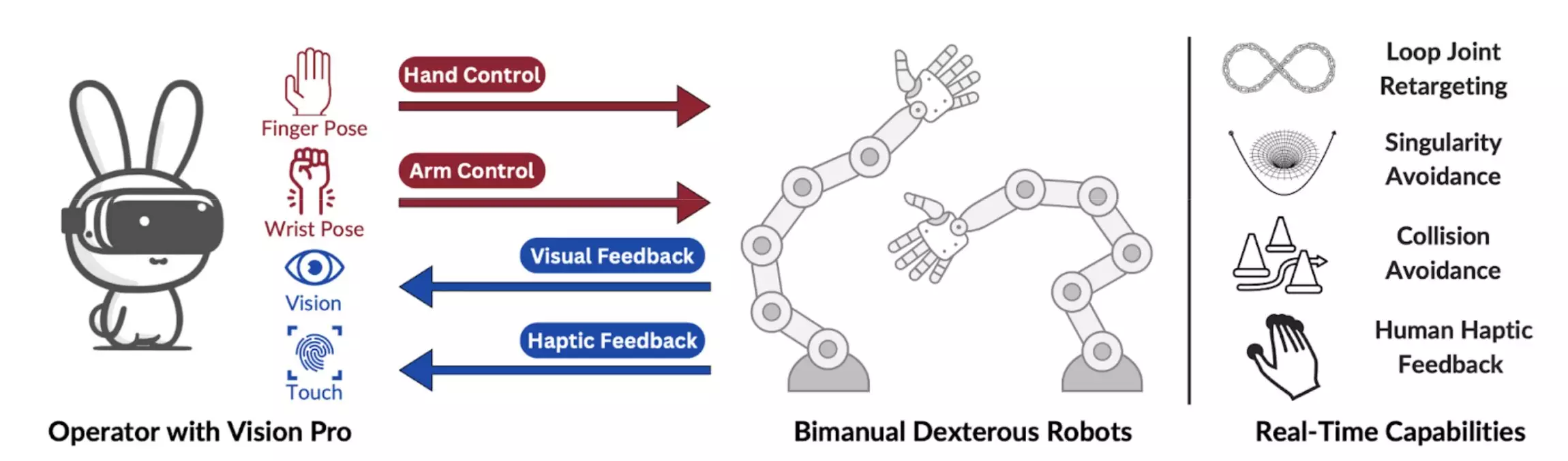
El objetivo principal del trabajo reciente de Wang y sus colegas fue desarrollar un sistema de teleoperación general que pudiera generalizarse a través de diferentes tipos de robots y tareas, simplificando en gran medida la recopilación de demostraciones para entrenar algoritmos de control robótico. El sistema Bunny-VisionPro podría hacer que la teleoperación y la recopilación de datos de demostración sean tan intuitivas y envolventes como jugar un juego en realidad virtual (VR). Este dispositivo teleoperado es portátil y ligero, proporcionando retroalimentación visual y háptica a los usuarios para una experiencia inmersiva.
El sistema Bunny-VisionPro desarrollado por Wang y sus colegas permite el control seguro de un sistema robótico bimanual en tiempo real, integrando retroalimentación háptica y visual. Esto hace que la recopilación de demostraciones sea más inmersiva para los usuarios humanos, al tiempo que mejora las tasas de éxito de teleoperación del sistema. Este sistema equilibra eficazmente la seguridad y el rendimiento, permitiendo el control de brazos robóticos y manos multidedos con un retraso mínimo, y proveyendo manejo de colisiones y singularidades, lo que resulta significativo para aplicaciones robóticas del mundo real.
Deja una respuesta