En el ámbito de la robótica, imitar la destreza humana puede ser una tarea ardua. Los humanos pueden alcanzar fácilmente un libro en una estantería desordenada, una hazaña que oculta la complejidad de los procesos subyacentes involucrados. Aquí es donde la planificación de movimientos se vuelve pertinente. El cerebro humano planifica movimientos sin esfuerzo y navega a través de obstáculos con poco pensamiento consciente. En contraste, los sistemas robóticos suelen luchar con entornos dinámicos, obstaculizados por algoritmos que son lentos y que no se adaptan bien a obstrucciones imprevistas. El desafío se intensifica exponencialmente cuando se requiere que los robots realicen tareas en espacios desconocidos donde las variables pueden cambiar inesperadamente.
Así como los humanos aprovechan sus experiencias para agudizar sus habilidades, la tarea ante los investigadores en robótica ha sido dotar de una adaptabilidad similar a sus creaciones. Los métodos convencionales de planificación de movimientos han luchado por replicar la fluidez y los ajustes rápidos característicos del movimiento humano. Aquí reside el brillo y la necesidad de la innovación que emerge del Instituto de Robótica de la Universidad Carnegie Mellon: la Planificación de Movimiento Neural.
La Planificación de Movimiento Neural representa un cambio fundamental respecto a los métodos tradicionales. Este enfoque utiliza una única red de inteligencia artificial capaz de navegar de manera integral en varios escenarios inesperados dentro de entornos domésticos como cocinas y salas de estar. Según Murtaza Dalal, un estudiante de doctorado en RI, esta innovación cobra relevancia al desplegar robots en entornos donde no se pueden prever todas las variables. Los métodos tradicionales claudican, principalmente debido a la insaciable demanda de comprobaciones de colisión que a menudo alcanzan cifras millonarias.
Lo que distingue a la Planificación de Movimiento Neural es su base impulsada por datos que se inspira en los procesos de aprendizaje humano. Los humanos generalmente comienzan a adquirir nuevas habilidades con una fase inicial de vacilación y avanzan hacia la fluidez y la velocidad con el tiempo. A través de un entrenamiento simulado en millones de entornos, la Planificación de Movimiento Neural mejora la eficiencia robótica en espacios no estructurados. El sistema de IA entiende no solo los aspectos conocidos de los entornos, sino que también puede improvisar y reaccionar efectivamente a elementos imprevistos, como una mascota o un objeto decorativo.
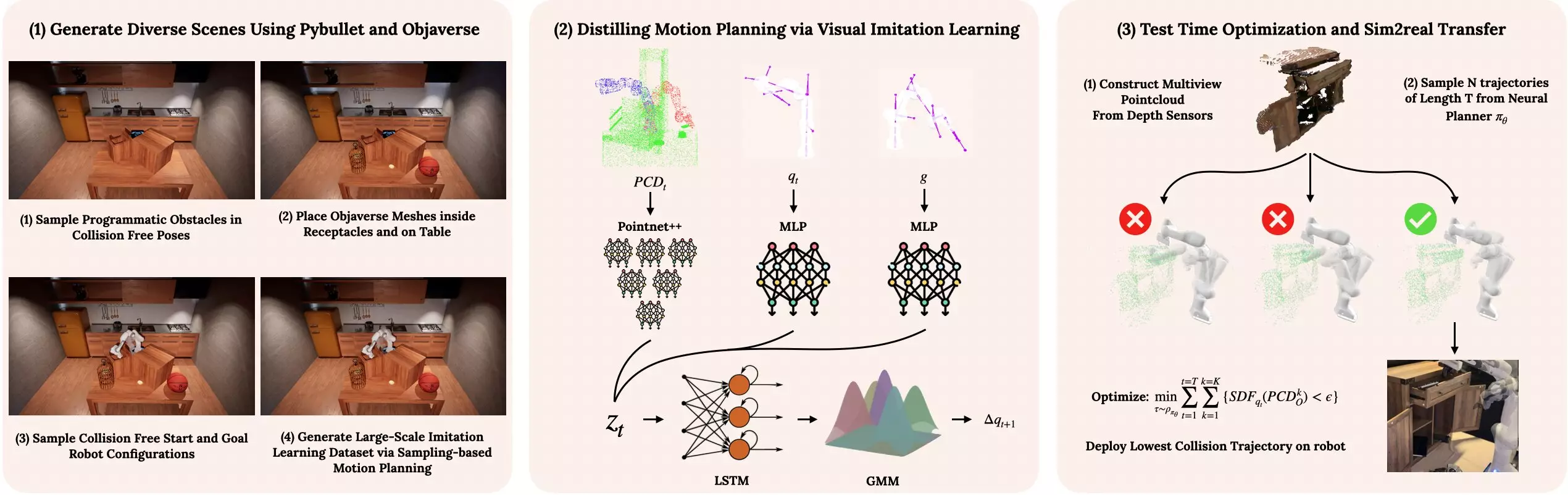
El equipo de investigación ha llevado a cabo extensos experimentos simulados para fomentar el desarrollo de esta avanzada capacidad de planificación de movimiento. Estas simulaciones replican dinámicas del mundo real que involucran obstáculos como estanterías, microondas, armarios, e incluso variables más impredecibles, como mascotas o artículos fuera de lugar. Los datos recolectados de estas simulaciones informan una política generalista que permite al robot operar de manera efectiva en entornos muy diferentes, demostrando un grado de generalización típicamente ausente en investigaciones anteriores sobre robótica.
Deepak Pathak, profesor asistente en RI, enfatiza el potencial de este enfoque como precursor de avances más amplios en el campo. A pesar de los notables avances realizados en el aprendizaje a gran escala para áreas como la visión y el lenguaje—ilustrados por sistemas como ChatGPT—la robótica se ha quedado atrás. Los desarrolladores de la Planificación de Movimiento Neural creen que este método podría cerrar esa brecha. Al aprovechar la simulación y fomentar la adaptabilidad, los robots pueden transferir habilidades aprendidas de un entorno a otro, mejorando su utilidad en diversas tareas.
Los resultados empíricos del uso de la Planificación de Movimiento Neural en entornos de laboratorio han demostrado ser prometedores. Cuando se le encargó navegar en un entorno desconocido, un brazo robótico pudo evitar hábilmente varios obstáculos del hogar. El proceso comenzó con la ingestión de un mapa tridimensional del entorno recogido a través de cámaras de profundidad, seguido de la provisión de configuraciones deseadas de puntos finales. El éxito de este modelo significa un paso monumental en la robótica, permitiendo que las máquinas completen tareas complejas de manera autónoma y eficiente.
Los investigadores, incluidos estudiantes de maestría como Jiahui Yang, expresan un gran entusiasmo por el potencial que tiene la Planificación de Movimiento Neural. La capacidad de un sistema robótico para navegar alrededor de impedimentos cotidianos, desde plantas hasta puertas de armarios, indica un cambio emocionante hacia robots más prácticos y adaptables capaces de funcionar en las complejidades de los entornos humanos.
A medida que el campo de la robótica continúa evolucionando, la integración de la Planificación de Movimiento Neural podría catalizar una revolución en la forma en que los robots interactúan con el mundo que les rodea, infundiéndoles finalmente la flexibilidad y la capacidad de respuesta que los humanos exhiben sin esfuerzo. Las implicaciones de esto son vastas, no solo para los robots domésticos, sino para cualquier sistema autónomo que requiera operar en entornos dinámicos. El viaje apenas ha comenzado, pero con innovaciones como la Planificación de Movimiento Neural, el futuro de la robótica se ve más brillante que nunca.
Deja una respuesta