El campo de la robótica ha experimentado avances significativos en los últimos años, especialmente en el desarrollo de garras robóticas capaces de manejar tareas complejas de manipulación de objetos. Mientras que las manos robóticas humanoides inspiradas en la anatomía humana han demostrado un rendimiento prometedor, a menudo vienen con altos grados de libertad y mecanismos intrincados, lo que las hace costosas y difíciles de programar.
Sin embargo, investigadores de la Universidad de Purdue y el Instituto de Tecnología de Massachusetts (MIT) han presentado un nuevo gripper robótico que ofrece un enfoque más simple pero igualmente efectivo para la manipulación de objetos. A diferencia de las manos robóticas tradicionales con altos grados de libertad, el gripper diseñado por Yu She y su equipo cuenta solo con 5 grados de libertad. Este diseño simplificado facilita su control a través de herramientas de programación, pero aún permite una manipulación similar a la humana en la mano.
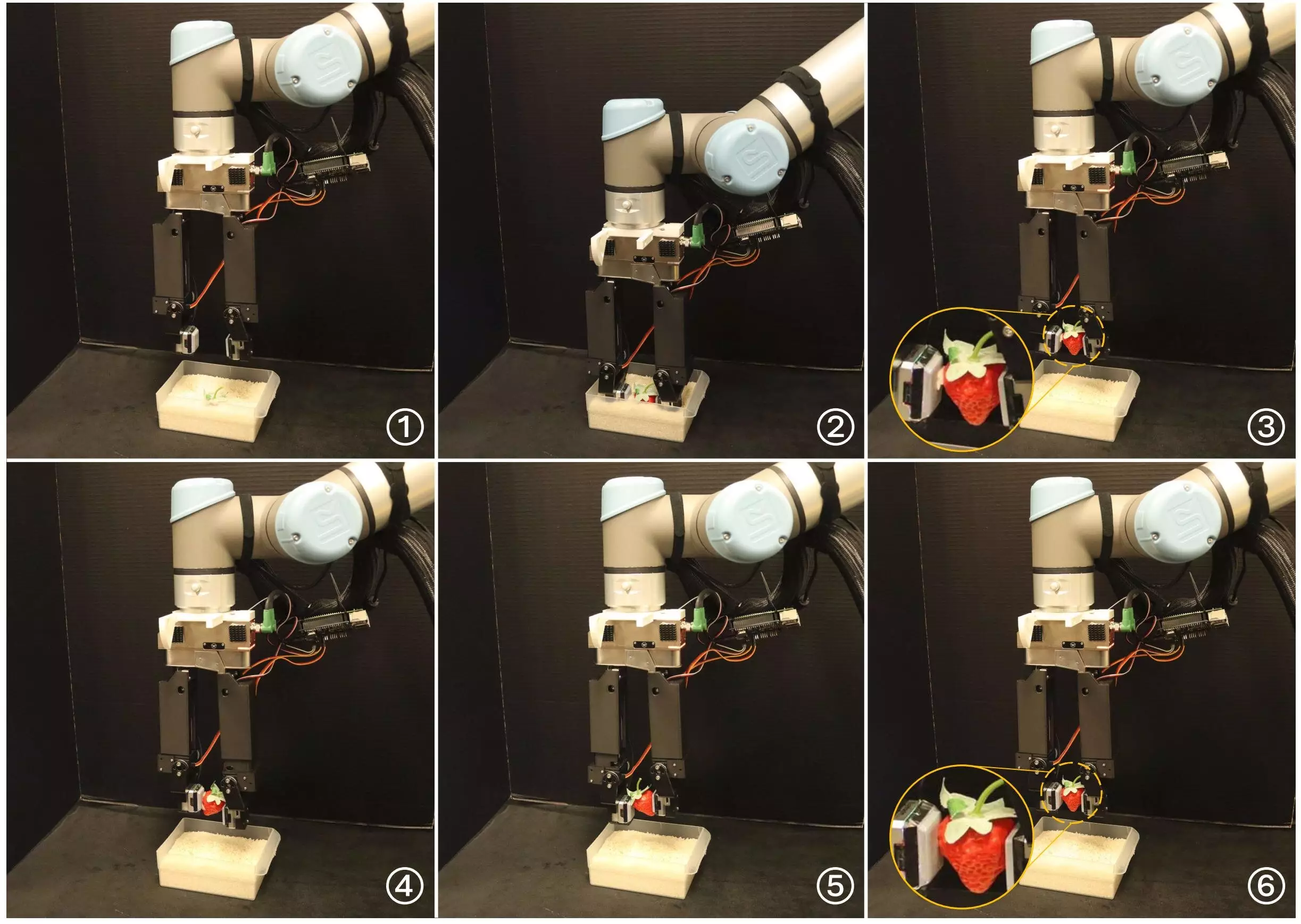
El gripper consta de dos dedos unidos a una base, con un sensor táctil basado en visión montado en uno de los dedos para proporcionar datos sensoriales cruciales. Mediante la combinación de actuadores lineales y motores servo rotativos en cada dedo, el gripper logra un total de cinco grados de libertad, lo que permite una amplia gama de capacidades de manipulación.
Una de las características destacadas de este nuevo gripper robótico es su capacidad para lograr un alto nivel de destreza durante las tareas de manipulación en la mano. A través de la combinación de sus cinco grados de libertad, el gripper supera las habilidades de manipulación básicas de los grippers tradicionales con menos grados de libertad. En experimentos del mundo real, el gripper demostró competencia en tareas como la singulación y la recolección, mostrando su versatilidad y potencial para manejar escenarios intrincados de manipulación de objetos.
Al simplificar el diseño del gripper robótico y reducir sus grados de libertad, She y su equipo han allanado el camino para soluciones robóticas más rentables y energéticamente eficientes. La disminución de la complejidad del gripper se traduce en un diseño de controlador más simple, lo que facilita su implementación y mantenimiento en diversas aplicaciones. Este enfoque simplificado no solo mejora la eficiencia de los sistemas robóticos, sino que también abre posibilidades para implementaciones generalizadas en industrias que requieren tareas precisas de manipulación de objetos.
La introducción de este innovador gripper robótico marca un paso significativo hacia la revolución de la manipulación de objetos en la robótica. Las aplicaciones potenciales de este gripper van más allá de sus capacidades actuales, con la oportunidad de enfrentar tareas de manipulación aún más desafiantes en el futuro. Los principios de diseño subyacentes del gripper podrían inspirar el desarrollo de sistemas robóticos similares que prioricen la rentabilidad y la eficiencia, remodelando el panorama de la tecnología robótica.
El desarrollo de un gripper robótico simplificado pero altamente efectivo representa un hito significativo en el campo de la robótica. Al cerrar la brecha entre las manos robóticas con altos grados de libertad y los grippers tradicionales, este enfoque innovador ofrece una solución prometedora para abordar tareas complejas de manipulación de objetos. Con mayor investigación y desarrollo, las posibilidades para este nuevo gripper son infinitas, prometiendo un futuro en el que las soluciones robóticas rentables y eficientes estén al alcance.
Deja una respuesta